+




24V-48V Dc Borstelloze Motor Driver ZM-6510A + BL01 Debugger 10A, van Toepassing Op Dc Borstelloze Motor Zonder Hall Motor Hieronder 300W
24V-48V DC borstelloze motor driver ZM-6510A + BL01 debugger 10A, van toepassing op DC borstelloze motor zonder Hall motor hieronder 300W

Belangrijkste kenmerken
◆ Hoge koppel en hoge snelheid output, met de maximale snelheid tot 10000rpm/min (afhankelijk van de motor snelheid);
◆ Met puls snelheid output, de motor snelheid kan worden waargenomen op elk moment;
◆ Snelheidsregeling modus: 0-5V analoge hoeveelheid en 10Hz - 300Hz PWM snelheidsregeling, handig voor gebruikers;
◆ Start stop enable stuursignaal en richting signaal;
◆ Functies zoals overstroom, overspanning, onderspanning, vergrendeld rotor, etc.
Product Overzicht
ZM-6510A DC borstelloze motor driver is de nieuwste product gelanceerd door ons bedrijf. Dit product maakt gebruik van grootschalige geïntegreerde schakeling te vervangen de originele hardware ontwerp, met hogere anti-interferentie en snelle respons prestaties. Dit product is geschikt voor rijden een low-voltage drie-fase DC borstelloze motor met Hal of zonder hall sensor wiens piek stroom onder 5A en voedingsspanning is binnen DC18V ~ 50V (panel nominale DC24V ~ 48V). De producten zijn gebruikt in een serie van elektrische automatisering gebieden zoals breien apparatuur, medische apparatuur, voedsel verpakking machines, elektrisch gereedschap, etc.
Functie Overzicht
De standaard fabrieksinstelling is de open lus modus van blokgolf met Hal/zonder Hall. Verschillende programma's kan worden geschreven volgens de behoeften van verschillende klanten om meerdere control modes zoals de gesloten lus controle van blokgolf met Hall snelheid en de gesloten lus controle van blokgolf zonder Hall snelheid.
Elektrische prestaties (bij omgevingstemperatuur Tj = 25 ℃)
Voeding DC18V ~ 50V DC voeding, capaciteit is geselecteerd volgens motor power
Uitgangsstroom piek 5.0A
Maximale vermogen 240W
Aanpassing motor Aanpassing motor met uitgangsvermogen ≤ 180W
Isolatieweerstand> 500M Ω bij kamertemperatuur
De isolatie sterkte is 0.5KV onder normale temperatuur en druk voor 1 minuut
Gebruik omgeving parameters:
Koeling mode: natuurlijke luchtkoeling (geforceerde luchtkoeling is aanbevolen)
Proberen om vermijd stof, olienevel en corrosieve gas in de omgeving
Temperatuur 0 ℃ ~ + 50 ℃
Vochtigheid <80% RH, geen condensatie, geen vorst
Trillingen 5.9m/s2 Max
Opslag temperatuur: - 20 ℃ ~ + 65 ℃
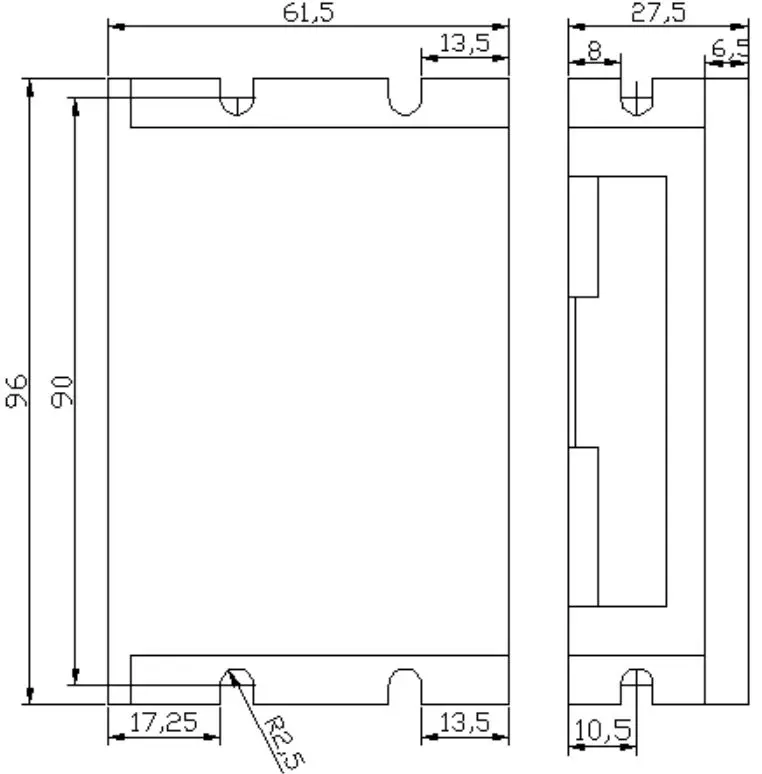
Algemene afmeting 96 × eenenzestig punt vijf × 27.5mm
Gewicht: ongeveer 0.15Kg
Lampje POWER groene lampje, power op geeft aan dat de voeding is normaal
ALARM rood status indicator
(1) de rode licht uit is onder normale omstandigheden;
(2) de rode licht altijd op wanneer NL is niet aangesloten op GND1;
(3) In geval van motor Hall schuld, de rode licht knippert 1 en stopt voor 1s;
(4) onder spanning (voedingsspanning <15V), de rode licht knippert 2 en stopt voor 1s;
(5) In geval van overspanning (voedingsspanning> 56V), de rode licht knippert 3 keer en stopt voor 1s;
(6) rood licht knippert 4 en stopt voor 1s in geval van overstroom (drive bedrijfsstroom> 6A);
(7) wanneer de motor is vergrendeld, de rode licht knippert 5 seconden en stopt voor 1 seconde;
(8) wanneer de bestuurder is overbelast, de rode licht knippert 6 seconden en stopt voor 1 seconde.
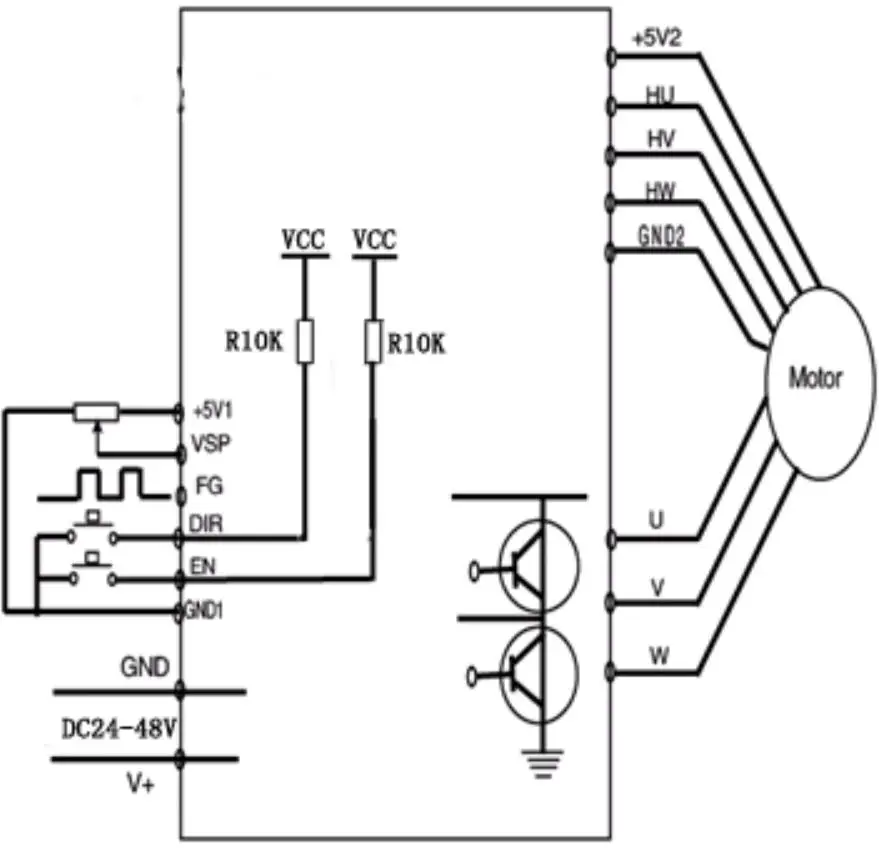
Stuursignaal terminal + 5V1 controle signaal voeding positieve (ingebouwde vermogen)
VSP externe snelheid stuursignaal, realiseren 0 ~ 100% motor snelheidsregeling via externe potentiometer
FG motor speed puls uitgang kan worden omgezet in werkelijke motor snelheid door meten de frequentie van dit signaal
DIR hoge en lage niveau controle motor vooruit en achteruit, sluit GND1 motor reverse, sluit GND1 of + 5V1 motor vooruit. Wanneer switching vooruit en achteruit, te verminderen impact, het is beter om set EN hoge eerste om de motor.
NL motor staat controle, EN aangesloten op GND1, motor running (online status), NL niet aangesloten of hoge niveau, motor niet running (offline status, deze status rood licht altijd aan)
GND1 controle signaal voeding grond
Hall signaal terminal + 5V2 motor Hall voeding positieve
HU Hall sensor signaal U fase ingang
HV Hall sensor signaal V fase ingang
HW Hall sensor signaal W fase ingang
Hal voeding grond van GND2 motor
Drie fase output signaal van motor en voeding terminal U, V, W motor, aangesloten op motor kronkelende
GND, V + DC 18V ~ 50V voeding ingang. (Panel nominale DC24V ~ 48V)
Functie beschrijving
Snelheidsregeling mode selectie (VSP/PWM) 1. externe ingang snelheidsregeling: sluit de twee vaste uiteinden van de externe potentiometer (5K ~ 10K) om de GND1 en + 5V1 uiteinden van de driver respectievelijk, en sluit de regulerende einde aan de VSP end. U kunt de externe potentiometer om snelheidsregeling. U kunt ook input analoge spanning naar de VSP end via andere controle-eenheden (zoals PLC, SCM, etc.) naar snelheidsregeling bereiken (relatieve om GND1). De acceptatie bereik van de VSP poort is DC 0V ~ + 5V, en de bijbehorende motor snelheid is 0 ~ nominale snelheid;
2. PWM snelheidsregeling: sluit de PWM positieve terminal te VSP en de negatieve terminal te GND1. De input frequentie kan worden 10Hz-300Hz en de duty cycle kan worden veranderd voor snelheidsregeling
Speed meting signaal (FG)
De driver biedt de motor speed meting puls signaal, die is evenredig met de motor snelheid. De puls uitgang modus is de open circuit uitgang van 4.7K collector van pull-up weerstand.
Snelheid berekening methode: motor (rpm) = F ÷ N × zestig
F = frequentie op FG pin eigenlijk gemeten met frequentie meter
N = aantal motor polen (2-pole motor N = 2; 4-pole motor N = 4)
Bijvoorbeeld, als de gebruiker selecteert een 4-pole motor, dan wanneer de output FG signaal is 200Hz, de motor speed = 200 ÷ 4 × 60 = 3000 rpm.
Motor vooruit/achteruit signaal
(DIR) de vooruit en achteruit rotatie van de motor kan worden gecontroleerd door de conversie van hoge en lage niveaus van de controle terminal DIR.
Opmerking: om vermijd plotselinge omkeren wanneer de motor draait op hoge snelheid, die zal een enorme impact op de motor en mechanische apparatuur, wanneer de DIR terminal ontvangt het omkeren signaal, de driver eerste vertraagt de motor totdat het stopt. Na stoppen voor ongeveer 1s, de motor verandert draairichting en snelheden tot de set snelheid.
De motor start/stop signaal (NL) kan de stop en werking van de motor via de conversie van hoge en lage niveaus van de controle terminal EN. Wanneer NL is laag, de motor werkt normaal; Wanneer NL is hoge niveau of niet aangesloten, de motor stopt werken en is in vrije staat, en het rode licht is altijd op. Op dit moment, de schijf stroomverbruik ≤ 20mA.
De fabrieksinstelling is EN en GND1 kortgesloten.
Bedrading diagram
Algemene afmeting: (eenheid: mm)
Handheld intelligente debugger is het nieuwste product van ons bedrijf, het is gebruikt om debug en set up onze F serie Borstelloze Motor Driver. Zodat, al onze F serie duikers kunnen set up parameter door het netwerk poort van driver, en nog steeds kan debug en set up door ZM-BL01.
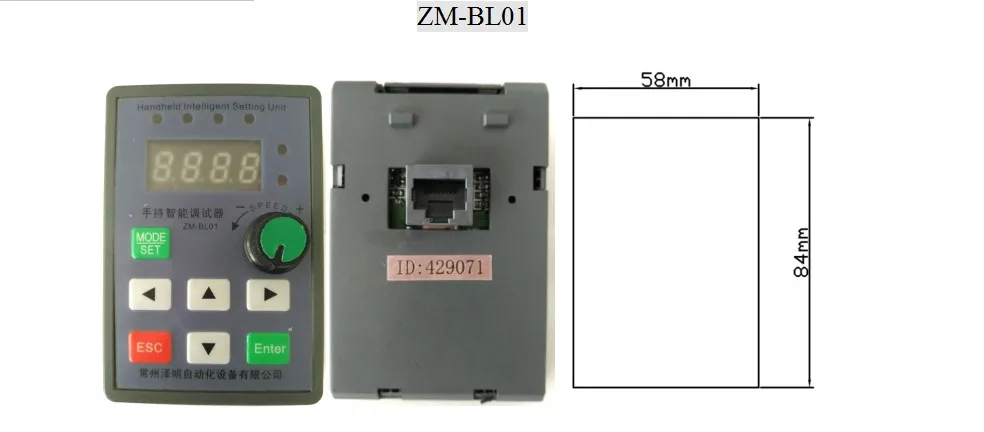

1. sluit: een van de telefoon lijn verbinden met bestuurder pot, en de andere verbinden met ZM-BL01's pot, vervolgens afgewerkt2. run: druk op de potentiometer knop, vier LED nummers (snelheid) zal worden getoond op debugger, het bereik is 0-9999 turn/min,. Wanneer Borstelloze motor beginnen te werken, de real-time snelheid zal op het board van debugger.3.Stop: Op de status van werken, druk op de knop weer, led niet licht, de debugger stoppen met werken, kan het worden ook gebruikt om noodstop voor de Borstelloze motor.
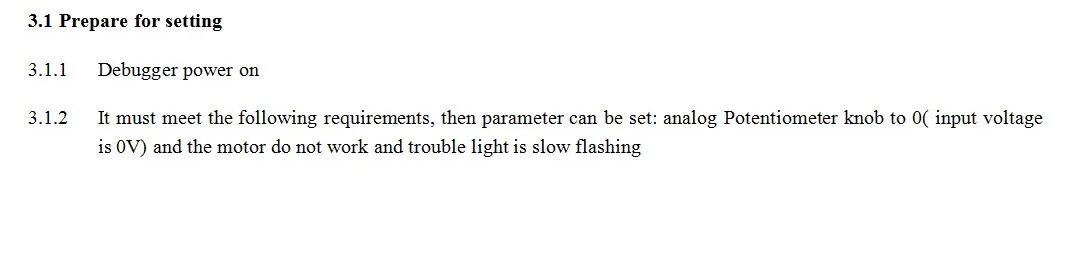
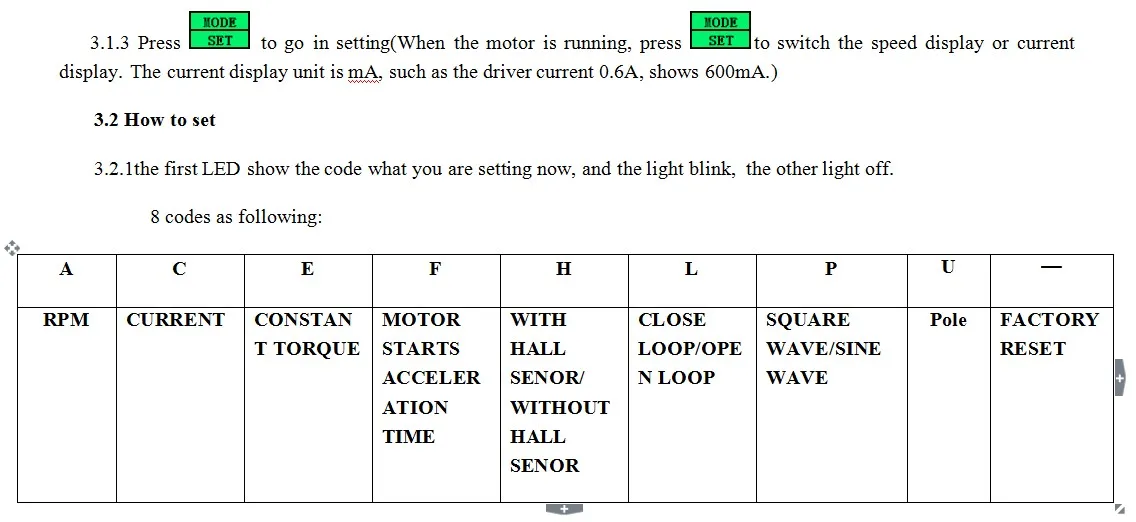
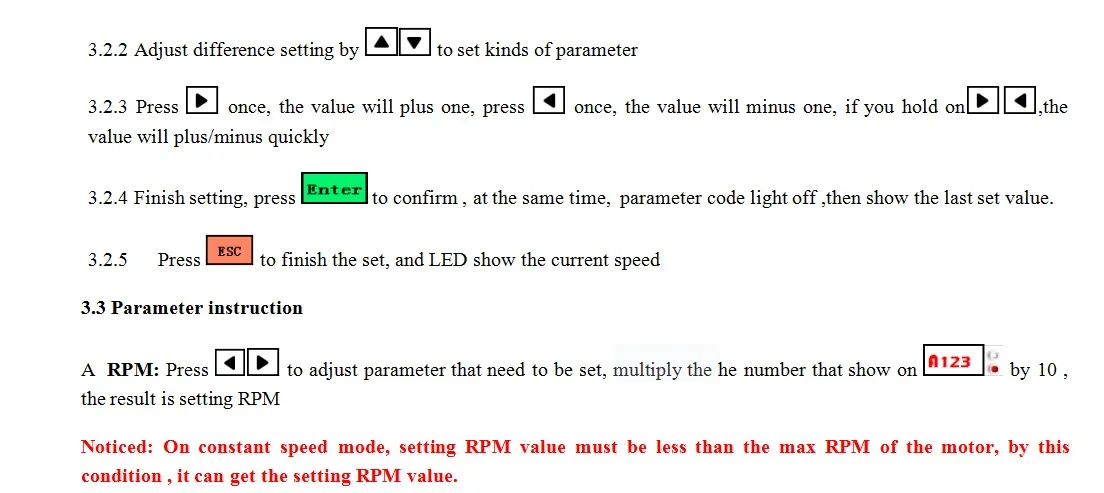
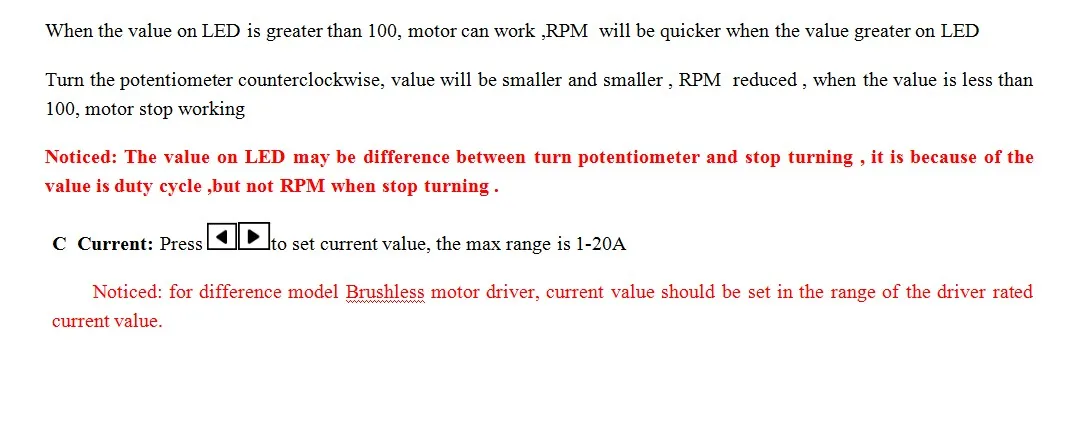
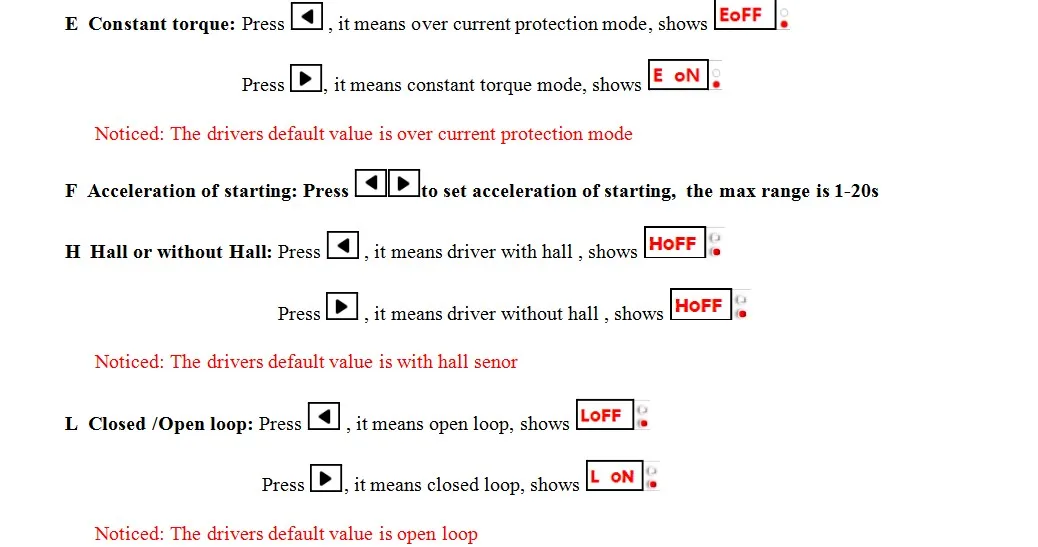
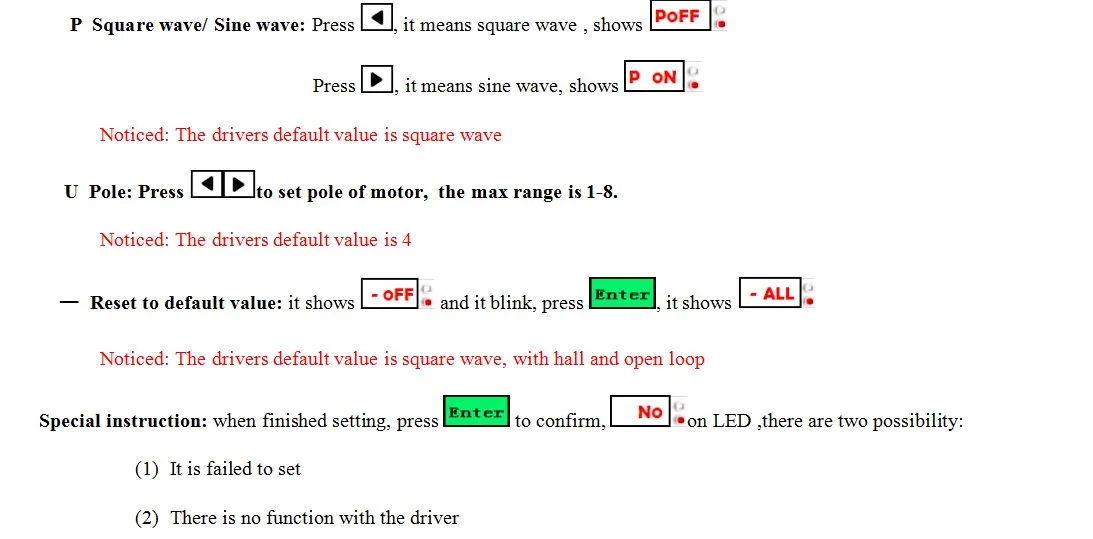
Parameter Instelling
Motortype : Dc Motor
Oorsprong : Cn (Oorsprong)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}